引言:
一、控制器分类
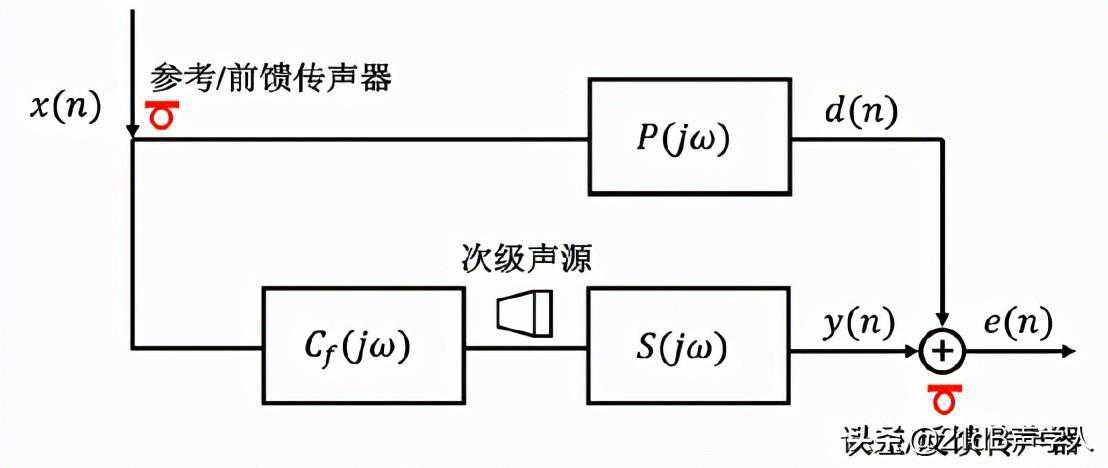
图1前馈控制结构
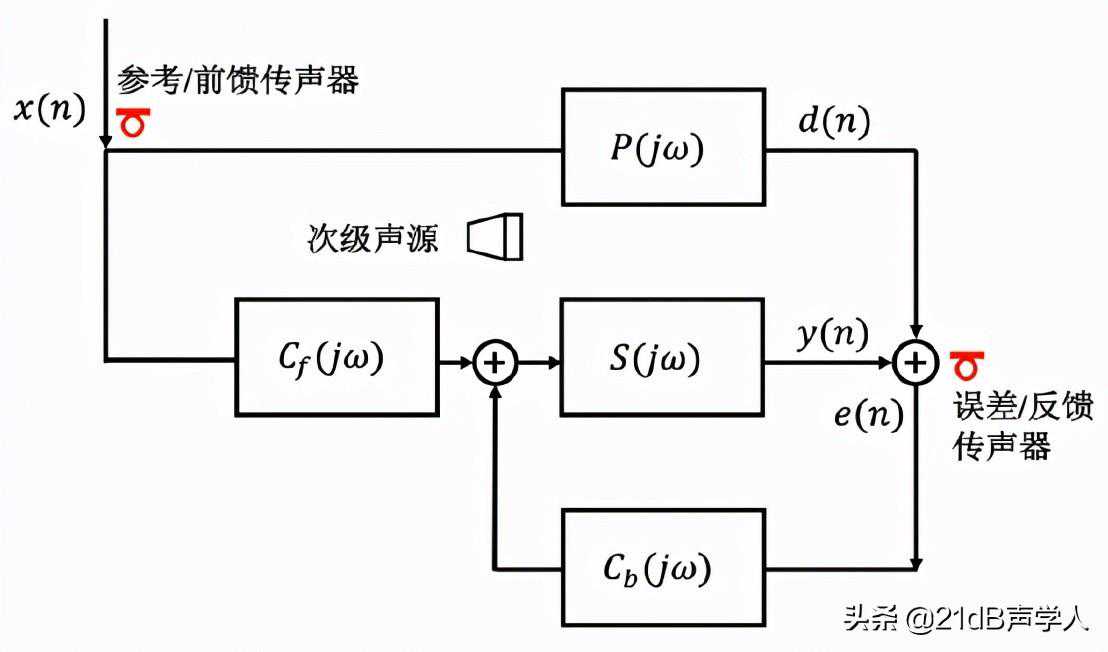
图4混馈控制结构
(2)按滤波形式,控制器可分为有限冲激响应控制器和无限冲激响应控制器,前者对当前系统输出值的预测仅受历史及当前输入的影响,不受历史输出的影响。后者对当前系统输出值的预测不仅受历史及当前输入的影响,也受历史输出的影响。
(3)按硬件实现方式,控制器可分为模拟控制器和数字控制器。在1980年以前,受电子工业发展水平的限制,控制器采用模拟电路实现,即以参数值不同的电容、电感、电阻搭配使用完成滤波。因此一旦固化定型,滤波系数便不能改变,不仅结构复杂、灵活性差、修改和升级难度大,且无法适应次级通道和外界噪声的变化。自1980年以来,随着高性能数字信号处理器(Digitalsignalprocessor,DSP)的迅速发展,其相比于模拟控制器具有灵活性高,且可自适应改变控制参数的优点,可采用模块化设计,方便调试与后续功能升级。在主动降噪耳机的应用中,控制器越来越多地采用数字控制器。
(4)按控制参数,也即滤波系数是否实时更新,控制器可分为固定控制器和自适应控制器。固定控制器的控制参数固定不变,省却因参数更新引入的频繁运算,可节省电能从而提升耳机的续航时间。自适应控制器的滤波系数可跟踪环境噪声的变化并调整,达到对时变环境噪声的良好控制。但实时更新参数,增加了计算操作数,不利于节省电能、提升续航。

二、水床效应

YuSH和HuSJ[15]曾使用递归二次规划(RecursiveQuadraticProgramming,RQP)搜索IIR控制器的滤波矢量,的次优解。然而对于直接型IIR滤波器,需要提取其极点半径并施加约束,因此Lienard-Chipart准则被用于确保控制器的稳定,这增加了优化问题的复杂性。SeoJH等人[16]尝试先设计高阶的内模FIR控制器,再使用平衡模型截断(BalancedModelTruncation,BMT)近似和频率弯折(FrequencyWarping)技术,用级联双二阶IIR滤波器来替换FIR控制器。这也是间接的设计方法,虽然回避了直接设计方法引入的非凸优化难题,但不完美的转换致使降噪量产生了一定程度的损失。

四、前馈控制器设计

五、讨论
2.次级通道(无论物理还是虚拟)频响随佩戴松紧度变化的问题
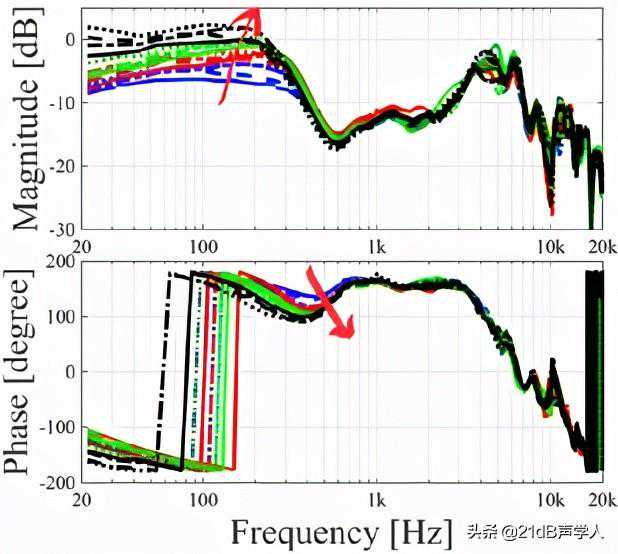
图5不同受试者佩戴同一耳罩时的物理次级通道频响
参考文献:
[1]BoydSP,BalakrishnanV,BarrattCH,[J].IEEETransactionsonAutomaticControl,1988,33(3):268-283.
[2]HeltonJW,∞optimizationwithtimedomainconstraints[J].IEEETransactionsonAutomaticControl,1989,34(4):427-434.
[3]RafaelyB,/∞activecontrolofsoundinaheadrest:designandimplementation[J].IEEETransactionsonControlSystemsTechnology,1999,7(1):79-84.
[4]BaiMR,pproach[J].TheJournaloftheAcousticalSocietyofAmerica,2002,111(4):1751-1757.
[5]ZhangL,WuL,[J].
AppliedAcoustics,2013,74(1):160-168.
[6][M].Elsevier,2000.
[7]BaiM,∞robustcontroltheory[J].TheJournaloftheAcousticalSocietyofAmerica,1997,102(4):2184-2190.
[8]Paweł[J].AppliedAcoustics,2002,63(11):11931213
[9][J].IEEETransactionsonControlSystemsTechnology,2008,17(2):465-472.
[10]LiangKW,–zeroplacementmethodforactivenoisecontrolheadphones[J].IEEETransactionsonControlSystemsTechnology,2016,25(4):1278-1283.
[11]BoydSP,:limitsofperformance[M].PrenticeHallEnglewoodCliffs,NJ,1991.
[12]WuL,QiuX,[J].AppliedAcoustics,2014,81:40-46.
[13]DoyleJ,GloverK,KhargonekarP,∞controlproblems[C]//1988,1988:1691-1696.
[14]TsaiMC,∞controllers[J].InternationalJournalofRobustandNonlinearControl,1995,5(3):155-173.
[15]YuSH,mentalrawdata[J].IEEE/ASMETransactionsonMechatronics,2001,6(4):483-490.
[16]SeoJH,YounDH,eadphones/earphones[J].TheJournalofKoreaInstituteofInformation,Electronics,andCommunicationTechnology,2017,10(1):57-65.
[17]orithms:technicalreport[R].1967.
[18]NelderJA,[J].TheComputerJournal,1965,7(4):308-313.
[19]KatajaJ,KääriäA,kactivecontrol[C]//:861-864.
[20]RajaMAZ,AslamMS,ChaudharyNI,–inspiredheuristicswithapplicationtoactivenoisecontrolsystems[J].NeuralComputingandApplications,2019,31(7):2563-2591.
[21]WangJ,ZhangJ,XuJ,ontrollersonactivenoisecancellationheadphones[J].AppliedAcoustics,2021,179(3):108081.
[22]LatosM,PAWEŁ[J].ArchivesofAcoustics,2009,34(4):521-535.
[23]







